What was IMAV 2024?
The International Micro Air Vehicle Conference is a yearly scientific conference and drones competition held in a different host city every time - in 2024 it was held in Bristol, UK. The event features a seperate indoors and outdoors event, with different mission requirements and design challenges. ADDI has competed in this event in 2019, 2023 and 2024, winning thrid place in the indoors comptition in 2019. Due to technical and development challenges we were unable to score a winning placement, but were able to improve on our results from 2023. IMAV2024 offical competition page
The Team
The IMAV 2024 Challenge team was devided into software and hardware subteams. Focus of the hardware team was on frame design, manufacturing, component selection and electronics. We were able to gain a lot of experience with CAD, carbon composites and drone design principles. All of the lessons learned will enable a smoother, faster, and more maintainable system for comming competitions Our software team focussed on implementing the low-level communications and operations as well as the different core functionalities required for autonomous operations. Based on ROS2 and Gazebo a simulation envirornment for fast testing has also been developed and refined.
The Tasks
The indoors-event featured a pre-defined flight course, demarkated with a blue line and dedicated task locations (see image). These tasks had to be completed in series as often as possible during a pre-defined time window. Scores then got calculated based on performance as well as the design and autonomy factors.
Fundamentally all tasks rely on a solid foundation of navigation and flight control, line-following and sensor-data collection. These foundational tasks were developed in paralell to the Task-specific requirements themselfs, which lead to delays and issues further down the line. In future competitions a reevaluation of tasks based on priority and dependency will be implemented.
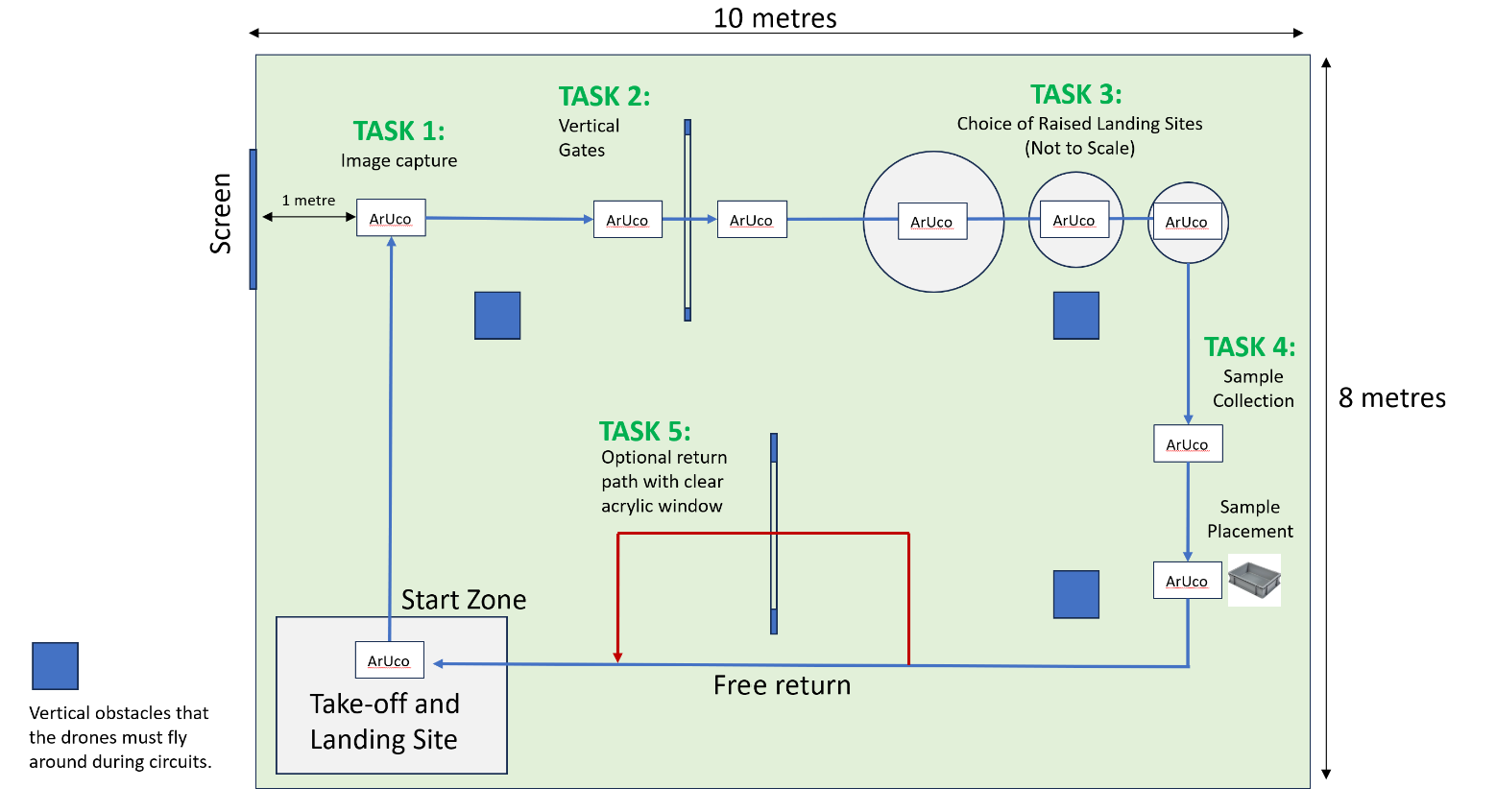
A lot of the complication comes from a combinaton of sensor data analysis and flight control, with a high degree of speed and precision required to avoid collisions with obstacles or missing landing platforms. Code quality and hardware performance both play an important role in this.
The Development
We started in October after just a short recovery break from IMAV 2023 with the goal of improving and documening the work done during the last project. After a slow start mostly focussed on organisational and technical specification and design the rules were released and development of the competition drone could begin. We started with preliminary CAD drawings and component selection on the hardware side and a more detailed software requirement specification on the software side. Early flight tests revealed significant difficulties in navigation and lower-level control, but proved the feasablity of the design in principle. Further refinement of the simulation and task approaches were conducted until the first flight-ready prototype of the competition drone could be performed. Especially the last weeks were a high-intensity but productive time with direct flight testing and integration, with the final software design being completed just hours before departure. Development and testing continued at the venue in Bristol, where a crash during a flight attempt lead to significant and partially ireparable hardware damage.
The Competition
Six people from the IMAV team travelled to Bristol to participate in the Competition. Work on the software continued in Bristol during the entire three day event (Day 1: general practice day, Day 2: outdoor competition and indoor practice day, Day 3: main competition day). After a productive first two days the drone crashed into a fence-post during the first morning scoring attempt on the competition day. We scrambled to get the error identified and hardware back to flight ready, but our pixhawk flight controler sustained significant damage and could not be repaired. A different team then lend us their backup, with which a manual flight attempt at least put us on the board.
During the second day a crash and battery fire from one of the other teams also lead to a two-hour evacuation of the entire facility, with lunch being served outside while the fire department made sure that no risk remained. No person was harmed and no equipment besides the burst battery sustained damage. The drone was operational again by the end of the day and was able to participate in the competition.
After the competiton concluded the next two days of scientific conference was used to build an incident report, catalouge the damage and cause of failiure as well as taking a look at the beautiful city of Bristol.
Lessons Learned
Many improvements in hardware, software and organizational structure were identified in the process of IMAV 2024 which will be applied for the comming projects, especially IMAV2025. Everyone on the team was able to get hands-on experience, learn new skills and collaborate across diciplines. While undoubtably some days especially towards the end were stressful for some, the overall result has been more than worth it. We are now looking forward to new challenges and opportunities to iterate and improve even further.
Join the team
Are you interested in pushing autonomous flight forwards? Ready to reach new heights? Want to work with a motivated team an learn new skills? We’re looking forward to working with you! See our open positions and send us your application!